|
|
|
|
|
Setup
Install the ReCirq package:
try:
import recirq
except ImportError:
!pip install -q git+https://github.com/quantumlib/ReCirq sympy~=1.6
Load Data
Go through each record, load in supporting objects, flatten everything into records, and put into a dataframe.
from datetime import datetime
import recirq
import cirq
import numpy as np
import pandas as pd
from recirq.qaoa.experiments.optimization_tasks import (
DEFAULT_BASE_DIR,
DEFAULT_PROBLEM_GENERATION_BASE_DIR)
records = []
for record in recirq.iterload_records(dataset_id="2020-03-tutorial", base_dir=DEFAULT_BASE_DIR):
task = record['task']
result = recirq.load(task, DEFAULT_BASE_DIR)
pgen_task = task.generation_task
problem = recirq.load(pgen_task, base_dir=DEFAULT_PROBLEM_GENERATION_BASE_DIR)['problem']
record['problem'] = problem.graph
record['problem_type'] = problem.__class__.__name__
recirq.flatten_dataclass_into_record(record, 'task')
records.append(record)
df = pd.DataFrame(records)
df['timestamp'] = pd.to_datetime(df['timestamp'])
df.head()
Plot
%matplotlib inline
from matplotlib import pyplot as plt
import seaborn as sns
sns.set_style('ticks')
plt.rc('axes', labelsize=16, titlesize=16)
plt.rc('xtick', labelsize=14)
plt.rc('ytick', labelsize=14)
plt.rc('legend', fontsize=14, title_fontsize=16)
# Load landscape data
from recirq.qaoa.experiments.p1_landscape_tasks import \
DEFAULT_BASE_DIR, DEFAULT_PROBLEM_GENERATION_BASE_DIR, DEFAULT_PRECOMPUTATION_BASE_DIR, \
ReadoutCalibrationTask
records = []
ro_records = []
for record in recirq.iterload_records(dataset_id="2020-03-tutorial", base_dir=DEFAULT_BASE_DIR):
record['timestamp'] = datetime.fromisoformat(record['timestamp'])
dc_task = record['task']
if isinstance(dc_task, ReadoutCalibrationTask):
ro_records.append(record)
continue
pgen_task = dc_task.generation_task
problem = recirq.load(pgen_task, base_dir=DEFAULT_PROBLEM_GENERATION_BASE_DIR)['problem']
record['problem'] = problem.graph
record['problem_type'] = problem.__class__.__name__
record['bitstrings'] = record['bitstrings'].bits
recirq.flatten_dataclass_into_record(record, 'task')
recirq.flatten_dataclass_into_record(record, 'generation_task')
records.append(record)
# Associate each data collection task with its nearest readout calibration
for record in sorted(records, key=lambda x: x['timestamp']):
record['ro'] = min(ro_records, key=lambda x: abs((x['timestamp']-record['timestamp']).total_seconds()))
df_raw = pd.DataFrame(records)
df_raw.head()
from recirq.qaoa.simulation import hamiltonian_objectives
def compute_energies(row):
permutation = []
qubit_map = {}
final_qubit_index = {q: i for i, q in enumerate(row['final_qubits'])}
for i, q in enumerate(row['qubits']):
fi = final_qubit_index[q]
permutation.append(fi)
qubit_map[i] = q
return hamiltonian_objectives(row['bitstrings'],
row['problem'],
permutation,
row['ro']['calibration'],
qubit_map)
# Start cleaning up the raw data
landscape_df = df_raw.copy()
landscape_df = landscape_df.drop(['line_placement_strategy',
'generation_task.dataset_id',
'generation_task.device_name'], axis=1)
# Compute energies
landscape_df['energies'] = landscape_df.apply(compute_energies, axis=1)
landscape_df = landscape_df.drop(['bitstrings', 'problem', 'ro', 'qubits', 'final_qubits'], axis=1)
landscape_df['energy'] = landscape_df.apply(lambda row: np.mean(row['energies']), axis=1)
# We won't do anything with raw energies right now
landscape_df = landscape_df.drop('energies', axis=1)
# Do timing somewhere else
landscape_df = landscape_df.drop([col for col in landscape_df.columns if col.endswith('_time')], axis=1)
import scipy.interpolate
from recirq.qaoa.simulation import lowest_and_highest_energy
def get_problem_graph(problem_type,
n=None,
instance_i=0):
if n is None:
if problem_type == 'HardwareGridProblem':
n = 4
elif problem_type == 'SKProblem':
n = 3
elif problem_type == 'ThreeRegularProblem':
n = 4
else:
raise ValueError(repr(problem_type))
r = df_raw[
(df_raw['problem_type']==problem_type)&
(df_raw['n_qubits']==n)&
(df_raw['instance_i']==instance_i)
]['problem']
return r.iloc[0]
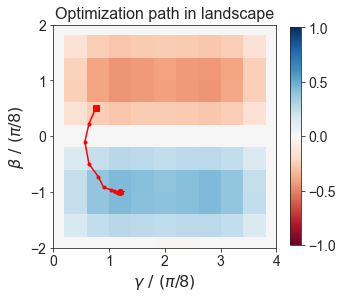
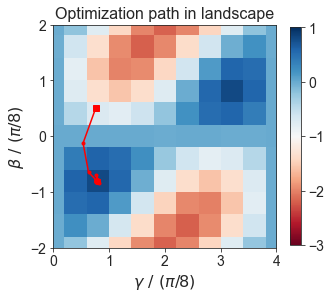
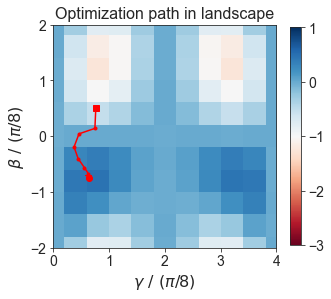
def plot_optimization_path_in_landscape(problem_type, res=200, method='nearest', cmap='PuOr'):
optimization_data = df[df['problem_type'] == problem_type]
landscape_data = landscape_df[landscape_df['problem_type'] == problem_type]
xx, yy = np.meshgrid(np.linspace(0, np.pi/2, res), np.linspace(-np.pi/4, np.pi/4, res))
x_iters = optimization_data['x_iters'].values[0]
min_c, max_c = lowest_and_highest_energy(get_problem_graph(problem_type))
zz = scipy.interpolate.griddata(
points=landscape_data[['gamma', 'beta']].values,
values=landscape_data['energy'].values / min_c,
xi=(xx, yy),
method=method,
)
fig, ax = plt.subplots(1, 1, figsize=(5, 5))
norm = plt.Normalize(max_c/min_c, min_c/min_c)
cmap = 'RdBu'
extent=(0, 4, -2, 2)
g = ax.imshow(zz, extent=extent, origin='lower', cmap=cmap, norm=norm, interpolation='none')
xs, ys = zip(*x_iters)
xs = np.array(xs) / (np.pi / 8)
ys = np.array(ys) / (np.pi / 8)
ax.plot(xs, ys, 'r-')
ax.plot(xs[0], ys[0], 'rs')### Hardware Grid
ax.plot(xs[1:-1], ys[1:-1], 'r.')
ax.plot(xs[-1], ys[-1], 'ro')
x, y = optimization_data['optimal_angles'].values[0]
x /= (np.pi / 8)
y /= (np.pi / 8)
ax.plot(x, y, 'r*')
ax.set_xlabel(r'$\gamma\ /\ (\pi/8)$')
ax.set_ylabel(r'$\beta\ /\ (\pi/8)$')
ax.set_title('Optimization path in landscape')
fig.colorbar(g, ax=ax, shrink=0.8)
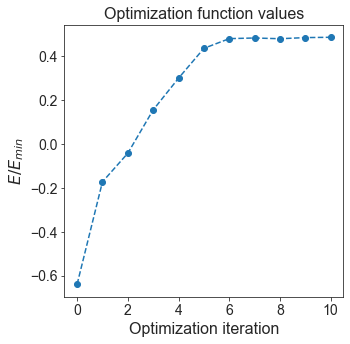
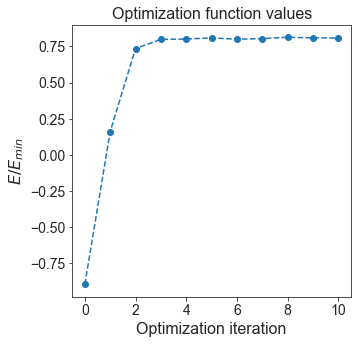
def plot_function_values(problem_type):
data = df[df['problem_type'] == problem_type]
function_values = data['func_vals'].values[0]
min_c, _ = lowest_and_highest_energy(get_problem_graph(problem_type))
function_values = np.array(function_values) / min_c
x = range(len(function_values))
fig, ax = plt.subplots(1, 1, figsize=(5, 5))
ax.plot(x, function_values, 'o--')
ax.set_xlabel('Optimization iteration')
ax.set_ylabel(r'$E / E_{min}$')
ax.set_title('Optimization function values')
Hardware Grid
plot_optimization_path_in_landscape('HardwareGridProblem')
plot_function_values('HardwareGridProblem')
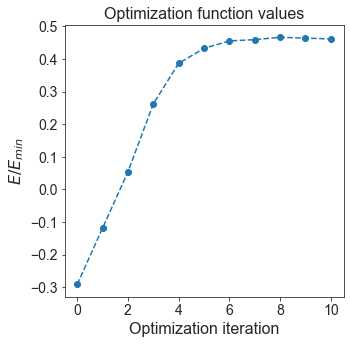
SK Model
plot_optimization_path_in_landscape('SKProblem')
plot_function_values('SKProblem')
3 Regular MaxCut
plot_optimization_path_in_landscape('ThreeRegularProblem')
plot_function_values('ThreeRegularProblem')